Pythonでダイレクトドライブモーターを回してみた!

おうちハックをしているとモーターを使用したくなるときがあります. どうしてもモーター音が気になってしまいます. そこで比較的静音なダイレクトドライブモーターというものがあります. ダイレクトドライブモーターはギアを持っておらず, モー ...
RaspberryPiで自動液体スプレーを作る!

コロナ禍でたくさんの電子工作物が生まれましたが, 感染防止の観点で自動アルコールディスペンサーもありました. ただしその機構はプッシュ式のものを物理的にモータ等で駆動したものが多かった印象です. そこで今回はポンプを使って液体噴射して ...
fritzingで配線図を書く!
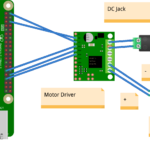
作成した電子工作物を説明するとき, 配線の様子を伝える必要があるときがあります. その配線した電子工作物の写真を見せることもありますが, 混線していると正確な情報を伝えられないこともあります. そんなときfritzingを用いると便利 ...
ArUcoマーカーを3Dプリントする!

ロボットナビゲーションをしているとロボットがどの方向を向いているか知りたくなるときがあります. その姿勢推定を可能にしてくれるのがArUcoマーカーで, ロボットに搭載されたカメラでArUcoマーカーを捉えると, その幾何学模様の歪み ...
ローカルでのGPU環境の構築
ローカルで機械学習環境を構築するとき, いつもGPU, CUDA, cuDNNと深層学習用のフレームワークのバージョン合わせに苦労します. 今回は私が環境構築する際の手順を紹介します.
セットアップNvidia driverのイ ...ROS環境でのArUcoマーカーによる空間認識

ロボット開発をしていると実空間上でそのロボットの位置を把握したくなるときがあります. そうしたときロボットがどの程度ある基準点から離れているかカメラで計測できると便利です. その基準点としてのマーカーの一つにArUcoがあります.
Mini PupperでObject Trackingのデモを動かしてみた!

最近”LOVOT”のような人の気持ちに訴えかけるコミュニケーションロボットが出てきています. MangDang社が開発したロボット犬”Mini Pupper”もそうしたロボットと同種の愛 ...
OpenCV AI KitをROS上で使ってみた!
VPUを備えたカメラ”OpenCV AI Kit”を用いると, エッジデバイスでも負荷の高い顔認識等のDeep learning技術を実装することができます. ロボット分野でこのカメラが使用できると, ロボット ...
Windows上でGPUやGUIが使用できるUbuntu環境をセットアップ!

機械学習で大変なことの一つにその環境構築があります. GPUとcudaのバージョンを合わせたり, 必要なpythonパッケージをインストールしなければなりません. それらをスクリプト一つで自動に実行してくれるのがdockerですが, ...
DockerでGPUやGUIを使えるROSの環境構築

ROSによる開発はとても便利ですが, その環境構築は面倒です. dockerでその環境構築を簡便にしようとすると, RVizやGazeboのGUI表示がうまくいかなかったり, GPUの設定に苦戦することがあります.
そのあたり ...